摘要
奇異性問題給並聯機構的設計和應用帶來了麻煩。冗餘驅動是目前解決奇異性問題的有效方法之一。然而,麵對並聯機構中眾多的關節,如何製定一個量化的準則,尋求最有效的關節加執行機構使機構通過奇異點,是一個必然的懸而未決的問題。研究了具有2個轉動和1個平動自由度(2R1T)和多遠運動中心(M-RCM)的2R1T 3-UPU (U為萬向節,P為移動節)並聯機構。基於運動/力傳遞性和約束指標的奇異性分析表明,該機構具有傳動奇異性、約束奇異性、混合奇異性和肢體奇異性。為了解決這些奇異問題,提出了可量化冗餘傳輸指數(RTI)和冗餘約束指數(RCI)來優化尋餘電機的冗餘執行機構。然後選擇合適的冗餘執行機構,並給出了相應奇異構型附近冗餘執行機構的工作方案,以幫助永磁電機通過奇異點。為求解並聯機構的奇異性,提出了一種優化冗餘執行機構的定量判據。
簡介
RCM(遠程運動中心)機構,它可以圍繞遠離機構本身的固定點旋轉[1],最初多用於微創手術機器人[2,3.,4,5].要實現這一目標,主要有兩種方法[6]:首先是冗餘自由度(DOF),這需要額外的控製手段,其次是受機構本身的約束。後者可分為以下幾種[7,8]:環形導軌、平行四邊形連杆、球麵連杆、平麵連杆、皮帶傳動、多級齒輪、並聯機構[9)等。
這種圍繞遠端中心的旋轉不僅在微創手術中是必需的,在金屬切割中也具有重要意義。它可以連接到五軸機床的一個重要功能:刀尖跟隨,也稱為旋轉刀具中心點(RTCP)或刀具中心點管理(TCPM) [10,11].在五軸加工中,由於刀具的轉動中心不在刀尖上,產生刀尖的額外平移,使得數控係統的控製點往往與刀尖不重合。因此,數控係統應自動控製平移軸,以保證刀具中心點和刀具與工件表麵的實際接觸點保持不變。本質上也是機構對RCM功能(繞刀尖旋轉)的需求。但是對於目前的係列機床和混合機床來說,實現這種運動的方法屬於上麵提到的第一種。
在之前的工作中[12,13],研究了一種2R1T 3-UPU PM,該PM可以圍繞其“約束平麵”內的任意點進行二維定點旋轉。通過調整PM的幾何參數,可以將“約束平麵”置於機構外部,實現多個遠程運動中心,稱為M-RCM機構。
基於2R1T M-RCM 3-UPU PM串聯二自由度移動平台,設計了一種混合機床,可實現RTCP功能,無需額外平移進行實時補償。這無疑縮短了RTCP期間的運動鏈長度,提高了機床的精度,降低了校準的難度。然而,奇異性問題限製了其工作空間和性能,因此該PM的奇異性解決方案還有待探索。
對於pm,奇點的主要解決方案是冗餘驅動[14].此外,冗餘執行機構的應用還可以優化各個關節的驅動力和載荷分布[15,16],增加剛度[17],提高承載能力[14],減小關節間隙引起的運動誤差[18,19].冗餘驅動的永磁可分為兩種類型[16]:(1)分支冗餘,即在不改變機構原有自由度特性的情況下增加一個或多個驅動分支。(2)肢體關節冗餘,是將一個或多個肢體中的一個或多個被動關節轉換為執行機構,而不改變機構原有的自由度特性。為了避免額外的分支對工作空間的影響,降低成本,本文將重點研究後一種類型。然而,pm的四肢通常有很多關節。如何選擇最優的冗餘驅動關節,使機構更好地通過奇異構型,是M-RCM 3-UPU永磁同步機構設計和應用的關鍵。
球(20.]根據扭扭和撚度,首先提出了描述剛體瞬時運動與所受力之間功率的虛係數。然後,這一理論在發展過程中不斷得到完善[21,22].劉等。[23,24,25]分別在自由度空間和約束空間中定義運動/力傳遞指標和運動/力約束指標,定性和定量地評價非冗餘驅動永磁同步電機的運動/力傳遞和約束性能。這些指標也可用於奇異性分析[26,27,28].對於冗餘驅動型永磁電機的性能分析,解決方法是通過各驅動器的排列組合,將機構簡化為多個非冗餘驅動機構,並製定相應的指標[29,30.,31].然而,當具有關節冗餘的並聯機構存在多個冗餘執行機構組合時,如何選擇最合適的執行機構關節組合使機構最佳地通過奇異構型是一個懸而未決的問題。
本文重點研究這一問題,組織結構如下2給出了M-RCM 3-UPU型永磁機構的描述及其逆運動學模型。部分3.基於運動/力傳遞率和約束指標,分析了3-UPU PM的奇異性問題,並對奇異性類型進行了分類。節4,針對不同類型的奇異性,提出了相應的冗餘執行器性能指標,並對兩種冗餘執行器組合進行了分析比較。然後給出了該電機冗餘驅動的最優尋優問題。結論將在節中提出5.
原理描述
M-RCM 3-UPU並聯機構
M-RCM 3-UPU並聯機構結構示意圖如圖所示1.由基礎平台(等邊三角形∆一個1一個2一個3.)、移動平台(等邊三角形∆B1B2B3.)和UPU的三個分支在120°對稱分布。每個肢體包含兩個萬向節和一個移動關節。為便於描述,將各肢的上下萬向節分為兩個單自由度的正交轉動關節,並分別命名。下U關節處我th (我= 1,2,3)肢時,直接與基礎平台相連的R關節被命名R我1,另一個R關節垂直於R我1被命名為R我2.P關節被命名為P我3..在上部U型接頭中,直接連接移動平台的R型接頭被命名R我5,另一個R關節垂直於R我5被命名為R我4.的坐標軸R我2而且R我4是平行的。兩軸之間的夾角R我1基本平台表示為θ,與軸之間的值相同R我5還有移動平台。同時,坐標軸R我1而且R我5在每一個肢體相交點米我,和一個平麵米由米1,米2,米3..一個1,一個2,一個3.為下U型關節的中心點,和B1,B2,B3.為上U型接頭的中心點。

M-RCM 3-UPU PM結構示意圖
當UPU肢的關節滿足上述幾何條件時,每個UPU肢都對移動平台提供了一個約束力。的約束力我分支表示為$ci,通過點米我平行於的軸R我2.在非奇異構型中,由三個UPU分支提供的三個約束始終位於平麵上米(飛機米也可以稱為約束平麵),它限製了機構的一個轉動自由度和兩個平動自由度。因此,機構的自由度為2R1T。移動平台可以繞約束平麵內任意軸連續旋轉米,也可以沿約束平麵的法線方向平移米.由於機構的輸出運動隻有純旋轉和純平移,因此不存在寄生運動[12].通過調整機構的幾何參數,約束平麵可以向上放置,遠離移動平台,如圖所示1.此時,機構在平麵上有多個遠程運動中心米,可稱為M-RCM 3-UPU PM。
全局坐標係{Ro}連接在點的基礎上O哪個是基地平台的中心一個1一個2一個3..的X-軸與基邊平行一個1一個3.和Z-axis垂直於基座。的Y-axis由右手定則定義。移動坐標係{Rp}連接在點的移動平台上P,是移動平台的中心B1B2B3..的x-軸與邊平行B1B3.和z-axis垂直於移動平台。的y-axis由右手定則定義。該機構的三個關鍵結構參數是基礎平台的限定半徑\(R = \左| {{\varvec{OA}}_{i}} \右|\),移動平台的限定半徑\(r = \左| {{\varvec{PB}}_{i}} \右|\),和角度θ.
逆運動學
該PM的遷移率為2R1T,如圖所示2.它的結構可以從兩個角度來描述α,β,以及距離年代。這些參數的定義如下:的正方向投影z-軸XOY{R平麵o是一個向量,表示為n.夾角n的正方向X設在是α.正方向之間的夾角z設在和Z設在是β。與此同時,年代之間的距離P而且O。該機構不同構型之間的變化可視為移動平台的旋轉β關於k翻譯過來就是O來P.

m - rcm3 - upu的逆運動學
鑒於α,β而且年代,該機構的逆運動學是求解三個移動關節的長度。根據之前的工作[12]時,將移動平台沿軸線放大到與固定平台三角形相同的尺寸R15,R25而且R35,一個名為C1C2C3.可獲得。此時,虛擬移動平台C1C2C3.總是與底座對稱嗎一個1一個2一個3.關於約束平麵米不管機構的結構如何。由於移動平台到虛擬移動平台的放大倍數是固定已知的,所以這兩個平台可以看作是固定連接,也就是說旋轉參數α而且β虛擬移動平台的與移動平台的一致,隻是距離不同d而且年代從各自的中心點到基地平台都是不同的。
根據上述關係,設置\(h = \左| {{\varvec{PP^{\prime}}}} \右|\)和梯形\(PB_{2} C_{2} P^{\prime}\),有
的交點Z-軸和約束平麵米標記為T.根據之間的對稱關係一個1一個2一個3.而且C1C2C3.,我們可以知道\(左\ | {{\ varvec{}}} \右左| | = \ {{\ varvec {TP ^{\ '}}}} \右| \),然後
如圖所示2,之間的關係年代而且d可以由餘弦定律得到\ \(三角形OPP ^ {\ '} \)
當年代是已知的d可由式(3.),的坐標\ (P ^ {\ '} \)在{Ro}可以用
這裏,一個向量k可以定義為\ ({\ varvec {k}} = {\ varvec {Z}} \ * {\ varvec {n}} \).因為,{Rp}和虛擬移動平台坐標係{Rp '}是平行的,它們的旋轉矩陣相對於{RO}都等同於旋轉β圍繞向量k.
的坐標\ (P ^ {\ '} \)在{Rp}是\(左\[{\開始{數組}{* c{20}}結束0 & 0 & h \ \ \{數組}}\右]^{{\文本{T}}} \)的坐標\ (P ^ {\ '} \)在{RO}可以用
的坐標B我在{Rp}容易獲得,其坐標可在{R中計算O},
最後,三個移動關節的長度可由下式得到
奇異性分析
這種3-UPU PM需要更大的角度θ在M-RCM工作構型中,這意味著工作空間很容易受到奇點[12].傳統的奇異性分析方法主要關注機構的雅可比矩陣是否降階或機構的約束/驅動螺杆係統是否線性相關,難以定量評價機構在奇異位形處或附近的性能。運動/力傳遞率和運動/約束傳遞率也可用於機構的奇異性分析,在機構運動性能的定量評價中具有優勢。為了比較不同冗餘驅動方式對機構通過奇異構型能力的影響,本文采用運動力傳遞率和約束作為分析機構奇異性的指標。
運動/力傳遞性和約束指標
首先考慮非冗餘機構,僅以各肢的移動關節為執行機構;UPU的分支如圖所示3..單位撚度描述j的第1-DoF關節我分支表示為$ij(0 <我≤3,0 <j≤5).關節的所有單位扭轉我各UPU肢構成其肢扭曲係統,表示為{T李},然後

萬國郵聯肢體
根據螺旋理論,當{T李}之間是線性無關的,一個螺絲$ci它與{中的所有單位扭轉數倒數T李},可以通過
約束扳手螺釘(CWS)$ci線向量是由我UPU連接到移動平台並對其進行操作米我點的方向與軸平行$我2.
當驅動關節P鎖定時,秩為{T李}由於缺少相應的關節p的運動螺釘而減小。除了CWS之外,還會有一個新的扳手,該扳手與秩減肢扭轉係統中的所有扭轉成反比,與CWS線性無關$ci,表示為$“透明國際”:
如圖所示的UPU肢體3.,根據式(11),$“透明國際”可以得到是一條線向量通過點嗎一個我與移動關節的軸共線。$“透明國際”是傳動扳手螺釘(TWS),也可稱為作動力螺釘。
類似地,如果kth (k= 1,2,4,5)關節中除驅動關節P以外的其他關節我第th支臂鎖定(包括P關節在內的其餘關節保持不變),將有另一個扳手,該扳手與降階支臂扭轉係統中的所有扭轉數成反比,且與CWS線性無關$ci,表示為$aik.$aik滿足以下公式:
當轉動關節R我1是否鎖定,對應$一個11由式(12)是一對通過點的夫婦B我.的實單位和對偶單位$一個11表示為\ ({\ varvec{年代}}_ {a11} \)而且\ ({\ varvec{年代}}_ {a11} ^ {0} \)分別為,\ ({\ varvec{年代}}_ {a11} ^ {0} \)滿足以下關係
當轉動關節R我2是否鎖定,對應$人工智能2由式(12)是經過點的線向量B我滿足如下關係
與此同時,\ ({\ varvec{年代}}_ {ai2} \)相交的\ ({\ varvec{年代}}_ {i1} \).
當轉動關節R我4是否鎖定,對應$人工智能4由式(12)是經過點的線向量一個我滿足如下關係
與此同時,\ ({\ varvec{年代}}_{愛啊}\)相交的\ ({\ varvec{年代}}_ {i5} \).
當轉動關節R我5是否鎖定,對應$人工智能5由式(12)是一對通過點的夫婦一個我滿足如下關係
如果確定驅動關節,則肢體的輸入扭絲(ITS)與相應關節的運動扭相一致,容易得到:
輸出螺杆(OTS)是由移動平台僅通過驅動產生的單位瞬時運動我驅動關節在外側的肢體我這個肢體被鎖住了,記錄為$oi.換句話說,隻有TWS的我在這種情況下,第1肢可以在機構的移動平台上工作,其餘肢的TWS也被視為對機構的約束。$oi可由下式得到:
限製扭螺絲(RTS)我肢體,表示為$rt我,是指不能由此引起的運動我無論執行器添加到肢的任何關節上。根據公式。(11) - (16的驅動力子空間我第Th支,用{表示W人工智能}可以確定為
$rt我倒數於{中的所有單位扭轉W人工智能}根據螺旋理論,$rt我是一對方向相同的情侶嗎$人工智能2而且$ci.
輸出限製扭螺杆(ports),表示為\ \(δ /\!\!\!{{\ varvec{年代}}}_ {Oi} \)機構的單位運動螺杆是允許發生CWS時所提供的我釋放第1肢,其餘肢的CWS不變,所有肢的TWS不變。\ \(δ /\!\!\!{{\ varvec{年代}}}_ {Oi} \)可以由下麵的方程得到
如果剛體的運動是單位扭轉$1,單位扳手的功率$2這個物體可以用兩者的倒數來表示$1而且$2.那麼下麵的性能指標就比較容易理解了。
- (1)
輸入傳輸指數(ITI)
非冗餘執行機構時,隻選擇三肢中的P關節作為執行機構。ITI為TWS與TWS的瞬時功率之比$“透明國際”(這個UPU分支的線向量)和ITS$2(對於該UPU分支為一對)到其對應的潛在最大功率,可由下式得到:
$$\mu_{i} = \frac{{\left| {/\!\!\!{{\varvec{S}}}_{Ti} \circ /\!\!\!{{\varvec{S}} _{Ii}} \右|}}}{{\左| {/\!\!\!{{\varvec{S}}}_{Ti} \circ /\!\!\!{{\ varvec{年代}}}_{二}}\右| _{\馬克斯}}}= \左|{{\文本{因為}}\ varphi_{我}}\吧。$ $ |(21)因為軸$“透明國際”總是在同一個方向$2,和角度φ我兩個軸之間為0,這個PM的ITI總是1。
- (2)
輸出傳輸指數(OTI)
OTI為TWS與TWS的瞬時功率之比$“透明國際”(這個UPU分支的線向量)和OTS$oi對應的潛在最大功率。以第一個肢體為例。如圖所示4,點E1和點F1的交點是$T2而且$T3.在約束平麵上米,分別。根據式(18),可得$O1線向量是E1F1作為軸和一個零節距。則OTI可由下式得到:
$$\eta_{i} = \frac{{\left| {/\!\!\!{{\varvec{S}}}_{Ti} \circ /\!\!\!{{\varvec{S}} _{Oi}} \右|}}}{{\左| {/\!\!\!{{\varvec{S}}}_{Ti} \circ /\!\!\!{{\ varvec{年代}}}_ {Oi}} \ | _{\馬克斯 } }}{ = }\ 壓裂{{\左| {d_σ罪我{1}\ \}\右|}}{{\左| {d_{1我\ max}} \右|}},$ $(22)這裏的定義d1我而且d1我馬克斯以第一個肢體為例。
圖4 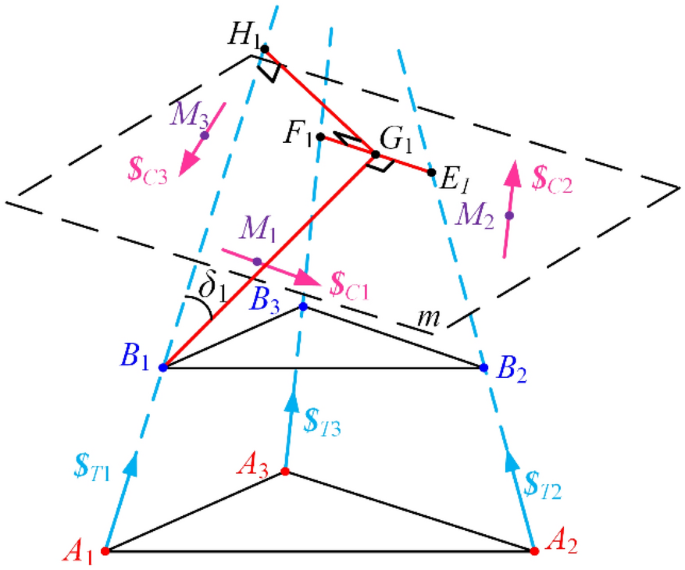
OTI的計算
如圖所示4,d11為公垂線(G1H1)之間的$T1而且$O1.所以,\(d_{11} = \左| {G_{1} H_{1}} \右|\).自動為點$T1去移動平台是永遠的B1時,對應的電勢最大功率等於離的距離B1在軸線上$O1.所以\(d_{11\max} = \左| {B_{1} G_{1}} \右|\).對於第一部分,式(22)可簡化為
$ $ \ eta_{{1}}{=} \壓裂{{\左| {d_{{1}{1}} \罪\σ}\右|}}{{\左| {d_{11 \馬克斯}}\右|}}{=}\壓裂{{\左| {{\ varvec {G}} _ {1} {\ varvec {H}} _{1}} \右|}}{{\左| {{\ varvec {B}} _ {1} {\ varvec {G}} _{1}} \右|}}= \罪\ delta_ {1}, $ $(23)在哪裏δ1軸線之間的夾角是多少$T1而且B1G1.
- (3)
輸入約束指數(ICI)
ICI表示CWS之間的瞬時功率之比$Ci(這個UPU分支的線向量)和RTS$rti(對於該UPU分支為一對)到其對應的潛在最大功率,可由下式得到:
$$\varepsilon_{i} = \frac{{\left| {/\!\!\!{{\varvec{S}}}_{Ci} \circ /\!\!\!{{\varvec{S}} _{rti}} \右|}}}{{\左| {/\!\!\!{{\varvec{S}}}_{Ci} \circ /\!\!\!{{\ varvec{年代}}}_ {rti}} \ | _{\馬克斯 } }}{ = }\ 左|{\因為\ psi} \吧。$ $ |(24)因為軸$Ci總是在同一個方向$rti,和角度ψ我兩個軸之間是0,這個PM的ICI總是1。
- (4)
輸出約束指數(OCI)
OCI表示水煤漿之間的瞬時功率之比$Ci(這個UPU分支的線向量)和ports\ \(δ /\!\!\!{{\ varvec{年代}}}_ {Oi} \)為其對應的潛在最大功率,可由下式得到:
$$\tau_{i} = \frac{{\left| {/\!\!\!{{\varvec{S}}}_{Ci} \circ \Delta /\!\!{{\varvec{S}} _{Oi}} \右|}}}{{\左| {/\!\!\!{{\varvec{S}}}_{Ci} \circ \Delta /\!\!{{\ varvec{年代}}}_ {Oi}} \ | _{\馬克斯 } }}{ = }\ 壓裂{{\左| {h_ {Oi} \因為\ gamma_{我}- d_罪我{2}\ \ gamma_{我}}\右|}}{{\√6 {h_ {Oi} ^ {2} + d_{2我\ max} ^ {2}}}}, $ $(25)在哪裏hoi是音高\ \(δ /\!\!\!{{\ varvec{年代}}}_ {Oi} \),γ我是夾角$Ci而且\ \(δ /\!\!\!{{\ varvec{年代}}}_ {Oi} \),d2我公垂線之間的距離是多少$Ci而且\ \(δ /\!\!\!{{\ varvec{年代}}}_ {Oi} \),d2我馬克斯垂直的距離是多少米我(這就是act for的意義所在$Ci),\ \(δ /\!\!\!{{\ varvec{年代}}}_ {Oi} \).
根據上述指標,本地傳播指數(LTI)κ和總約束指數(TCI)λ能否建立評價整個機製的性能
$ ${聚集}\ \開始kappa = \敏\左\ {{\ mu_{我}\ eta_{我}}\右\},\,i = 1, 2, 3, \ hfill \ \ \λ= \敏\左\ {{\ varepsilon_{我}\ tau_{我}}\右\},\,i = 1, 2, 3。\hfill \\ \end{collected}$$(26)

基於性能指標和螺旋理論的奇異性分析
根據節中得到的LTI和TCI3.1的值。κ而且λ均與機構構型有關,且均在[0,1]範圍內。的值越大κ而且λ,力/運動傳遞和約束性能分別越好。當κ或λ變成零,機構就變成了奇異位形。如圖所示1,結構參數為R= 100毫米,r= 50毫米,θ= 80°。集年代= 170 mm,繪製機構LTI等高線圖α而且β為極坐標軸,如圖所示5.根據圖例的顏色條,輪廓顏色越接近藍色,則越小κ機製的。輪廓顏色越接近黃色,越大κ機製的。

OTI的計算
如圖所示5,根據顏色變化的趨勢,κ的機構可能成為零之間的兩條相鄰的等高線,即κ=0.05,也就是說,附近存在一個奇異構型β= 35°。通過進一步減少搜索步驟,我們可以得到機構的奇異構型α= 90°,β= 34.83°和年代= 170mm,如圖所示6.此時肢體2的OTI指數為\(\eta_{2} = 0\)(少於10個−5為零),TWS$T2與OTS軸相交$O2移動平台,所以$T2是無法工作的$O2.從螺旋係統的相關性分析來看,根據式(18),$O2直線向量是E2F2為軸,並與CWS相交$C1,$C3.和TWS$T1,$T2,$T3.,與水警係統平行$C2.也就是說,在這種奇異構型下,當三個驅動關節P鎖定時,瞬時旋轉自由度為E2F2因為軸仍然是自由的。

傳輸奇點
集年代= 85 mm,繪製機構TCI等值線性能圖,如圖所示7.根據圖例的顏色條,輪廓顏色越接近黑色,則越小λ的機理是,顏色越接近白色,越大λ機製的。根據顏色變化趨勢,λ的機構可能成為零之間的兩條相鄰的等高線,即λ= 0.09,也就是說,附近存在奇異構型β= 20°。

TCI等高線圖
通過進一步減少搜索步驟,我們可以得到機構的奇異構型α= 90°,β= 19.70°,年代= 170mm,如圖所示8.肢體2的OCI指數為τ2= 0, CWS$C2不能參加體育考試\ \(δ /\!\!\!{{\ varvec{年代}}}_ {Oi} \).這與文獻中的分析結果一致。[12].因為這三個約束在平麵上的一點相遇米,約束螺杆係統的階數減小,軸通過時機構的轉動自由度減小米2垂直於平麵米是補充道。

約束奇點
從圖中也可以看出7這一λ是極不穩定的β= 20°,α= 30°,150°和270°。與文獻中的分析結果進行比較。12],這違背了運動/力約束性能分析的前提條件,即肢體關節的運動螺釘是相互獨立的。
這種奇異構型是由於同一肢的上下U型關節中兩個轉動關節的軸線重合,導致肢圍繞移動關節軸線旋轉的局部自由度,如圖所示9.

肢體奇點
分析奇異位形與年代(移動平台與底座的中心距離),並保持移動平台與固定平台平行,LTI、TCI與的關係年代,如圖10.可以發現,當年代為94 mm時,LTI和TCI同時為零,即傳輸奇異和約束奇異同時出現,也可稱為混合奇異。當混合奇點出現時,交點問三個tws中的一個剛好落在約束平麵上米,如圖所示11.根據螺旋理論,軸在平麵上的任何旋轉米通過問不能限製,機製就失控了。

TCI/LTI與年代

混合奇點
由於在混合奇點情況下機構的幾何關係非常清楚,因此可以推導出混合奇點的構型如下:
冗餘驅動及其優化求解
通過節中的分析2,可得出四種奇異性,即傳動奇異性、約束奇異性、混合奇異性和四肢奇異性。這些奇異的問題將嚴重影響該項目的應用。為充分利用M-RCM 3-UPU並聯機構無附加分支的特點,考慮在分支中增加冗餘執行機構,使機構順利通過奇異構型。
但是,由於肢體中有很多關節,如何選擇更合理的關節作為冗餘執行機構是本節要解決的問題。為保證機構具有良好的動態性能,需要使冗餘執行機構的位置盡可能靠近基礎平台。因此,冗餘執行機構的選擇範圍僅限於底座的三個下U型接頭。底座的下U型關節可分為兩個轉動關節RR,其中劃線的關節為冗餘執行機構。案例1 (3-RRPU模型):三個轉動關節R我1直接連接到基座平台作為冗餘執行器使用。案例2 (3-RRPU模型):三個轉動關節R我2與移動關節P直接連接的均選用冗餘執行機構。接下來,將比較和優化兩種情況下通過奇異構型對機構性能的影響。
傳動奇異性的冗餘驅動
本節對第二肢的傳動奇異性進行分析,如圖所示6.然後TWS$T2與OTS軸相交$O2;並且不能工作在$O2.在情形1中,根據式(13),每個驅動器提供一對移動平台。並且,作為冗餘驅動接頭,在工作時能提供一定的扭矩,自身運動跟隨移動平台的運動;並且不影響OTS$O2機製的。
定義冗餘傳輸索引(RTI)\ (\ chi_{我}^ {1}\)的我例1的分支如下:
它的物理含義是TWS之間功率的平均值$我1由冗餘接頭提供我th肢和OTS$好吧(k= 1,2,3)的所有三個分支。因此,\ (\ chi_{我}^ {2}\)這是RTI指數我情況2的第Th條邊隻需要替換$我1與$我2式中(28).RTI可以反映某一分支中冗餘執行器對各分支對應OTS的效率貢獻,也可以定量描述冗餘執行器解決傳輸奇異性問題的效率。
將情形1和情形2的RTI比較曲線畫在分支2中傳輸奇異點發生的位置附近,如圖所示12.為了機構的對稱性,肢1和肢3的RTI相同,這裏隻畫肢1和肢2的曲線。
可以看出,在情形2中,肢體1和肢體2的RTI大於情形1,同時,當發生轉移奇點時(\(\beta = 34.83^\circ\)虛線所表示的),情況2的第二分支RTI達到最大值1,效率最好。但是,情形1中分支2的RTI變為0,這意味著機構無法通過奇異構型。

傳輸奇異點附近的RTI
約束奇異性的冗餘驅動
本節分析第二肢的約束奇異性,如圖所示8.當約束奇點出現時,三個水柱在平麵上相交於一點米.減小了約束螺杆係統的階數,提高了機構的自由度。現在,由肢部冗餘執行機構產生的ITS也可以看作是移動平台的冗餘約束螺釘。因此,冗餘約束指數(RCI)\ (\ varpi_{我}^ {1}\)的我情形1中的第Th支定義如下:
它的物理含義是TWS之間功率的平均值$我1(也可視為CWS)所提供的冗餘接頭我th肢和ports\ \(δ /\!\!\!{{\ varvec{年代}}}_{好}\)(k= 1,2,3)的所有三個分支。因此,\ (\ varpi_{我}^ {2}\)這就是RCI指數我情況2的第Th條邊隻需要替換$我1與$我2式中(28).RCI可以反映某一肢中冗餘執行器對各肢對應ort的效率貢獻,也可以定量描述冗餘執行器解決約束奇異性問題的效率。
將case 1和case 2的RCI比較曲線畫在肢體2出現約束奇異點的位置附近,如圖所示13.

RCI在約束奇異點附近
為了機構的對稱性,肢1和肢3的RCI相同,這裏隻畫肢1和肢2的曲線。從圖中可以看出,情形1中第一個肢體的RCI與情形2中的第二個肢體的RCI相似,但在情形2中第二個肢體的RCI在約束奇異位形附近幾乎為零(\(\beta = {19}{\text{.70}}^\circ\)虛線標記的部分)。顯然,對於通過約束奇異點的機構,情形1的效率更高。
混合奇異點的冗餘驅動
根據式(27)時,混合奇異點的構型相對固定,主要與年代.case 1和case 2的RTI和RCI曲線可根據公式分別繪製。(28)及(29).由於移動平台和基礎平台是平行的,並且每個分支都是相同的,因此隻提取第一個分支的數據,如圖所示14而且15.混合奇點的位形發生在年代= 94.5214,用虛線標記。

RTI在混合奇點附近

RCI在混合奇點附近
從圖中可以看出,case 2的RTI值比較大,而RCI值比較小。換句話說,對於傳動性能而言,構型2更有利於機構通過混合奇異點;然而,對於約束的性能,情況1更有效。但總的來說,差別是很小的。
肢體奇異性的冗餘驅動
支肢的奇異性不同於其他奇異性問題,主要表現為支肢內關節螺釘的線性相關,從而產生局部自由度。在外載荷作用下,並聯機構處於連杆奇異位形時,連杆容易發生旋轉。這種局部運動一旦發生,整個機構的對稱性就會受到擾動,對執行機構和整個結構都會帶來很大的影響。假設第一肢為奇異肢,顯然奇異肢外的冗餘作動器對局部運動沒有影響,隻需要考慮該肢內的冗餘作動器。如圖所示9,情形1為第一轉動關節的軸R11第一肢與局部旋轉運動軸共線,對局部運動的限製效率為1。而在情況2中,是第二個轉動關節的軸R12在第一肢中垂直於局部旋轉的運動軸,局部運動的限製效率為零。因此,隻有情形1才能求解機構的分支奇異性。
冗餘執行機構的優化尋優
案例1和案例2解決這四個奇異問題的性能指標不同,但案例1可以適用於所有奇異問題;因此,選擇case 1作為M-RCM 3-UPU機構的冗餘執行機構模式。當機構接近傳動奇異位形時,奇異肢中的冗餘執行機構幾乎不能通過奇異位形,隻能作為被動關節跟隨機構運動。此外,在其他兩個分支的冗餘執行機構需要提供扭矩。
當機構接近約束奇異位形時,各分支的冗餘執行機構可以協同工作。但非奇異肢執行機構效率較高,優化內力可提高執行機構的載荷。當機構接近混合奇異位形時,各分支的冗餘執行機構通過奇異位形的效率相同,它們可以協同工作。當機構接近分支奇異點時,需要合理控製奇異點分支中冗餘執行器轉矩,以平衡局部運動方向上的外部載荷。此外,當肢體發生奇點時,應控製冗餘執行機構配合機構整體運動。
結論
本文介紹了M-RCM - 3-UPU PM,建立了該機構的逆運動學模型。通過運動/力傳遞率和約束指標對機構的性能進行分析,並繪製出相應的性能圖。基於性能圖和螺旋理論,得到了機構的四種奇異性:傳動奇異性、約束奇異性、混合奇異性和肢奇異性。從性能指標LTI/TCI和約束/驅動螺杆係統的角度,揭示了這些奇異點的性質與相應構型的關係。
為了解決工作空間中可能出現的奇異問題,考慮了應用於分支的冗餘執行機構。提出了執行器模式的兩種情況。情形1是3-RRPU模型。情形2是3-RR聚氨酯模型。選擇帶下劃線的轉動關節作為冗餘執行機構。
針對永磁同步電機冗餘驅動情況的優化尋找,提出了冗餘驅動性能指標RTI和RCI,定量地反映了冗餘驅動解決奇異問題的效率。通過RTI和RCI指標,對兩種冗餘執行機構模式的性能進行了分析和比較。然後,情形1更適合於解決這四個奇異問題,並給出了其在相應奇異位形附近的工作方案。這些工作可為後續冗餘執行器控製提供理論依據,解決M-RCM 3-UPU PM的奇異問題,使其具有更多的應用場景。
參考文獻
J Smits, D Reynaerts, E Poorten。並聯遠端運動中心機構優化設計的綜合與方法:在機器人眼科手術中的應用。機理與機械理論, 2020, 151: 103896。
王震,張偉,丁旭。一種新型二自由度遠端運動中心機構的設計與分析。機理與機械理論, 2020, 153: 103990。
S Hamid, Z Fat Em Eh, H J Shahram。受遠端運動中心約束的微創手術機器人約束運動控製。智能與機器人係統雜誌岩石力學與工程學報,2019,95:901-913。
劉珊珊,陳b - b,卡羅,等。具有遠程運動中心的電纜連接。機械機械理論, 2016, 105: 583-605。
A雅雅爾,G Kiper, M C Dede。具有遠程運動中心的非寄生2r1t並聯機構的運動學設計將用於微創手術應用。機理與機械理論, 2020, 153: 104013。
宗光,裴曉平,餘傑,等。一自由度遠端運動中心機構的分類與類型綜合。機理與機械理論, 2008, 43(12): 1585-1595。
郭春華,戴建生,達斯古普塔。微創手術機器人的運動學設計考慮:概述。國際醫學機器人與計算機輔助外科雜誌, 2012, 8(2): 127-45。
陳國強,王傑,郝偉。一種新型平麵二自由度遙控運動中心機構,靈感來自於波塞利-利普金直線連杆機構。機械設計雜誌岩石力學與工程學報,2018,141(1):015001。
魏玉娥,楊誌,秦川麗。具有遠程運動中心的並聯機器人的運動學與性能分析。機械工程學報地球物理學報,2019,55(5):65。(中文)
丁青,王偉,薑誌強,等。五軸數控機床rtcp軌跡生成方法及檢測能力比較。機械工程學報地球物理學報,2019,55(20):116-127。(中文)
李濤,李飛,蔣勇,等。考慮熱誤差的3-P(Pa)S並聯主軸頭運動學標定。機電一體化, 2017, 43: 86-98。
趙春,陳誌強,李勇,等。新型2r1t 3-Upu並聯機構運動特性分析。機械設計雜誌岩石力學與工程學報,2020,142(1):012302。
趙春,陳震,宋傑,等。一種新型三自由度並聯主軸頭在引力場中的變形分析。機理與機械理論, 2020, 154: 104036。
莫斯塔什裏,杜皮亞,魏偉,等。本文綜述了冗餘驅動並聯機器人軟件的研究進展,以供進一步應用。IEEE/ASME機電一體化彙刊浙江農業學報,2018,23(3):1259-1269。
T Kokkinis, P Millies。一種具有驅動冗餘度的平行機械臂區域結構。機理與機械理論, 1991, 26(6): 629-641。
S B Nokleby, R Fisher, R P Podhorodeski,等。冗餘驅動並聯機器人的受力能力。機理與機械理論, 2005, 40(5): 578-599。
張東,徐勇,姚傑,等。一種新型三自由度運動/驅動冗餘平麵並聯機構的運動學、動力學和剛度分析。機理與機械理論, 2017, 116: 203-219。
X張,X張。利用平麵冗餘驅動機構,最大限度地減少轉動關節間隙的影響。機器人技術與計算機集成製造, 2017, 46: 104-113。
丁傑,王春,吳宏。驅動冗餘並聯定位機構精度分析。機械科學與技術雜誌岩石力學與工程學報,2019,33(1):403-412。
R S球。螺絲釘理論的專著.倫敦:劍橋大學出版社,1998。
林誌誠,張偉堂。平麵連杆機構的力透射率指標。機理與機械理論, 2002, 37(12): 1465-1485。
C Chen, J Angeles。空間連杆機構的廣義傳遞指數和傳遞質量。機理與機械理論, 2007, 42(9): 1225-1237。
王傑,吳昌傑,劉學傑。並聯機器人的性能評估:運動/力傳遞率及其指標。機理與機械理論, 2010, 45(10): 1462-1476。
劉曉傑,陳曉霞,娜宏。低自由度並聯機器人的運動/力約束分析。機械與機器人學報浙江農業學報,2014,6(3):031006。
謝峰,劉曉娟,等。一種具有閉環被動肢體的並聯機器人運動-力交互性能評價方法。機理與機械理論, 2020, 149: 103844。
劉曉傑,吳春春,王傑。一種新穎的並聯機構奇異點分析及奇異點接近度測量方法。機械與機器人學報岩石力學與工程學報,2012,4(4):041001。
徐玲,陳剛,魏勇,等。新型2r1t冗餘驅動過約束並聯機構Hex4的設計、分析與優化。Robotica浙江農業學報,2018,37(2):1-20。
徐麗,李強,童傑,等。Tex3:具有最小關節自由度和固定線性執行機構的2r1t並聯機械臂。國際精密工程與製造雜誌浙江農業學報,2018,19(2):227-238。
張文堂,林誌剛,李建傑。並聯機構的力傳遞性能。機器人係統雜誌地球物理學報,2003,20(11):659-670。
謝峰,劉學傑,王傑。吸收運動/力傳遞性的冗餘並聯機構性能評估。國際先進機器人係統雜誌, 2011, 8: 66。
李q,張娜,王峰。冗餘驅動並聯機構優化設計的新指標。機械與機器人學報浙江農業學報,2017,9(1):011007。
確認
作者衷心感謝黃震教授燕山大學在準備手稿時進行批判性的討論和閱讀。
資金
國家自然科學基金項目(No. 51775474)和河北省自然科學基金項目(No. 51775474)資助。E2020203197)。
作者信息
作者及隸屬關係
貢獻
ZC負責整個試驗;CZ撰寫稿件;其餘的協助取樣和實驗室分析。所有作者都閱讀並批準了最終的手稿。
作者的信息
陳昭,1992年生,現任西安交通大學博士研究生燕山大學機械工程學院,中國.他在某某大學獲得碩士學位燕山大學,中國2017年。主要研究方向為並聯機器人和並聯機床。
宋敬科,1994年出生。他在某某大學獲得碩士學位燕山大學,中國2021年。
陳雪晨,1995年出生,現任北京大學博士研究生燕山大學機械工程學院,中國.
陳子銘,1984年生,現任西安交通大學副教授燕山大學,中國.他獲得了博士學位燕山大學,中國主要研究方向為並聯機構設計與分析理論、機器人技術。
丁華峰,1977年出生,現任北京大學教授中國地質大學(武漢)他獲得了第一個博士學位燕山大學,中國2007年。他獲得的第二個博士學位德國杜伊斯堡-埃森大學2015年。主要研究方向為機構結構綜合、概念設計、平麵和空間機構控製與應用。
相應的作者
道德聲明
相互競爭的利益
作者聲明沒有相互競爭的經濟利益。
權利和權限
開放獲取本文遵循知識共享署名4.0國際許可協議,允許以任何媒介或格式使用、分享、改編、分發和複製,隻要您對原作者和來源給予適當的署名,提供知識共享許可協議的鏈接,並注明是否有更改。本文中的圖像或其他第三方材料包含在文章的創作共用許可協議中,除非在材料的信用額度中另有說明。如果材料未包含在文章的創作共用許可協議中,並且您的預期使用不被法定法規所允許或超出了允許的使用範圍,您將需要直接獲得版權所有者的許可。如欲查看本牌照的副本,請瀏覽http://creativecommons.org/licenses/by/4.0/.
關於本文

引用本文
趙春,宋傑,陳旭,陳曉明。et al。M-RCM 3-UPU並聯機構冗餘執行機構優化尋優下巴。j .機械工程。Eng。34, 121(2021)。https://doi.org/10.1186/s10033-021-00651-7
收到了:
修改後的:
接受:
發表:
DOI:https://doi.org/10.1186/s10033-021-00651-7
關鍵字
- 並聯機構
- 2 r1t
- RCM
- 奇點
- 冗餘驅動